腹腔鏡画像を用いた手術ロボットの誘導制御
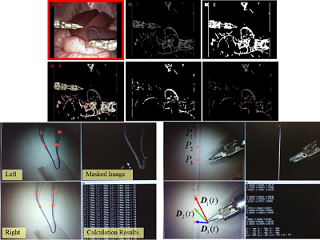
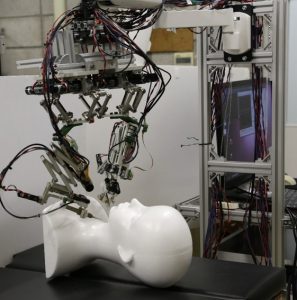
腹腔鏡下手術において距離感の誤認識による操作の誤り等は,術者の負担を増大させる原因となっています. 本研究では,マスタスレーブ型腹腔鏡下手術支援ロボットにおいて, 腹腔鏡画像を画像処理することにより対象物の三次元形状を認識し, その情報に基づいてスレーブマニピュレータを誘導制御することで作業効率化の実現を目指しています.
![]()
腹腔鏡下手術において距離感の誤認識による操作の誤り等は,術者の負担を増大させる原因となっています. 本研究では,マスタスレーブ型腹腔鏡下手術支援ロボットにおいて, 腹腔鏡画像を画像処理することにより対象物の三次元形状を認識し, その情報に基づいてスレーブマニピュレータを誘導制御することで作業効率化の実現を目指しています.