
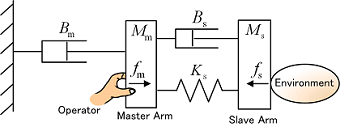
力覚提示機能を有する腹腔鏡手術用ロボットシステム
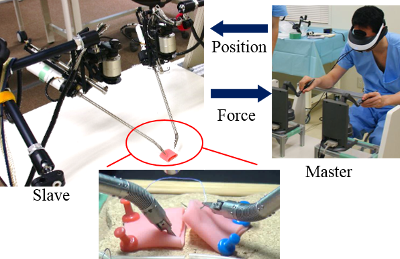
腹腔鏡手術用のマスタ・スレーブ型ロボットシステムの研究開発を行っています. 本システムは,患者側で処置を行うスレーブアームと,医師が操作するマスタアームから構成されます. スレーブアームに空気圧駆動を採用することで,人体と接触しても柔らかく力を吸収できるだけでなく, 空気の圧力情報から反力を推定して,操作者の手に力覚提示できることを特徴としています.
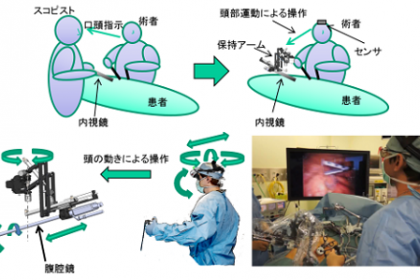
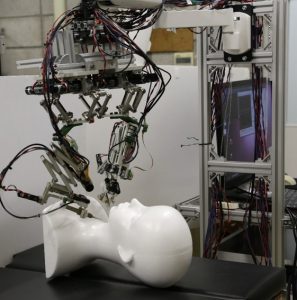
空気圧駆動ロボットアームを用いた腹腔鏡操作システム
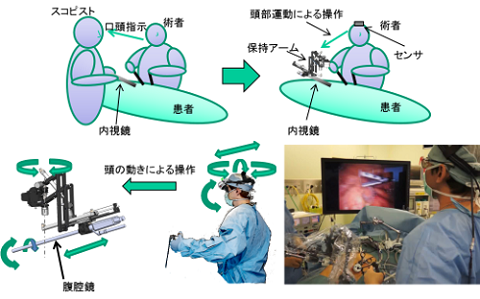
本研究では、腹腔鏡手術において術者自身が助手の手を借りることなく内視鏡視野を操作できるシステムの開発を行っています。 内視鏡を把持した空気圧駆動ロボットアームを術者の頭部運動に連動させることで直感的な操作性を実現しています。 頭部運動による動作指令に対して、保持アームが十分な追従性を有することを実験的に確認するとともに、 in-vivo実験からも開発したシステムの有効性を実証しています
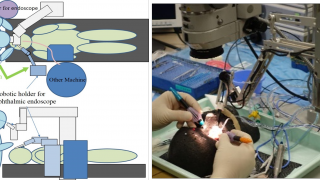
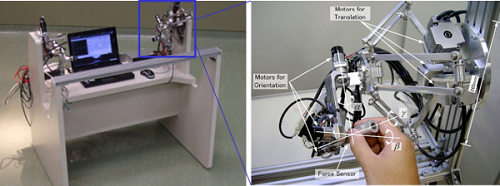
眼内内視鏡保持ロボットシステム
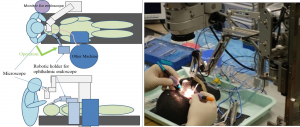

 網膜硝子体手術において、術者の第3の手として,眼内内視鏡を安全かつ精密に保持,操作するロボットシステムの研究開発を行っています。安全性の高い機構や眼球の回転に対する視野の補正機能などの研究を行っています。
網膜硝子体手術において、術者の第3の手として,眼内内視鏡を安全かつ精密に保持,操作するロボットシステムの研究開発を行っています。安全性の高い機構や眼球の回転に対する視野の補正機能などの研究を行っています。
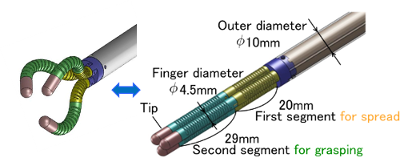
腹腔鏡手術用ハンド型空気圧駆動マニピュレータ
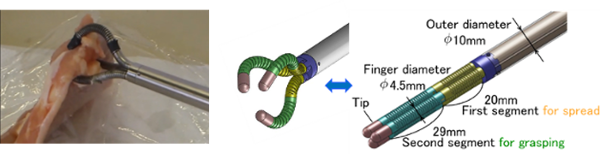
腹腔鏡手術においてマスタ・スレーブ方式により操作可能なハンド型マニピュレータの開発を行っています. 本マニピュレータは,柔軟構造による指関節を有しており,一直線状の形態で腹腔内に進入し,内部でハンド状に展開可能となっています. また,空気圧駆動を採用することで把持力等を計測制御できることを特徴としています.
腹腔鏡画像を用いた手術ロボットの誘導制御
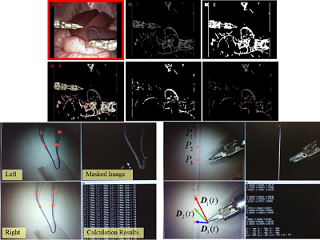
腹腔鏡下手術において距離感の誤認識による操作の誤り等は,術者の負担を増大させる原因となっています. 本研究では,マスタスレーブ型腹腔鏡下手術支援ロボットにおいて, 腹腔鏡画像を画像処理することにより対象物の三次元形状を認識し, その情報に基づいてスレーブマニピュレータを誘導制御することで作業効率化の実現を目指しています.
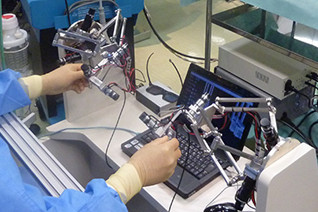
形成外科用微細手術支援ロボットシステム
形成外科におけるマイクロサージャリーを対象としたマスタ・スレーブ型の手術支援ロボットシステムの研究を行っています。機構や制御方法に工夫を凝らすことで、コンパクトで操作性の良いシステムを実現し、実用化を目指して開発を進めています。
遠隔操作システムの力覚感度指標に関する研究
力覚提示機能を有する遠隔操作システムでは、インピーダンス制御により 作業内容や好みに合わせて操作中のインピーダンスを設定することで操作性の向上が期待できますが, 設定によっては物体と接触時の力覚感度が低下してしまう場合があります. これは,物体接触時と非接触時の操作者が受ける力の差または比すなわち力のコントラストといえる量が 大きく低下するためであると考えられますが, 制御パラメータと力覚感度の定量的な関係は明らかではありません. 本研究では,力のコントラストを各制御パラメータの関数として表現し、制御パラメータ設計の指標として構築することを目指しています.
空気圧サーボシステムに関する研究
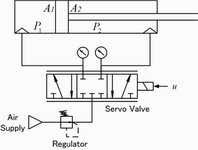
一般に,空気圧アクチュエータは空気の圧縮性などによる非線形特性を有していますが, サーボバルブを用いて圧力センサから得られる駆動力の制御ループを構成することで, 空気圧駆動特有の非線形性を補償することが可能となり,駆動力を高速,高精度に発生することができます. 空気圧アクチュエータを用いた駆動システムのさらなる性能向上を目指して、バルブや空気圧回路、制御方法に関する研究を行っています。
手術ロボットシステム用ハプティックインターフェースの開発
手術支援ロボットシステムの操作のためのハプティックインターフェースの開発を行っています. 安定な操作と高感度の反力フィードバックの実現を目指して,機構や制御方法の検討を重ねています. また,指先に刺激を与えることで力覚感度を向上させる研究も行っています.
水蒸気噴流を用いた生体凝固デバイスの開発
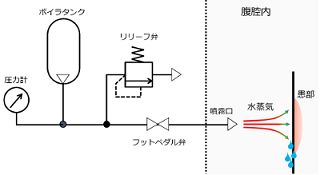
水蒸気は凝縮する瞬間に大量の凝縮熱を放出します.この特徴に注目し,組織が炭化・乾燥することなく瞬間的に凝固できる新しいエネルギーデバイスを提案・開発しています. これまでに動物実験にて止血効果を確認しており,ブタ大網にて約1秒, ブタ肝臓の深さ1mm程度の切除面にて約20秒,脈管を含むブタ肝臓の切断面にて約50秒,蒸気を噴射し止血に成功しています.
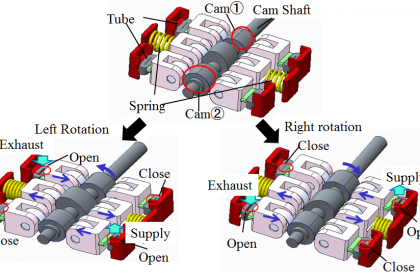
弾性チューブを用いた空気圧サーボバルブの開発
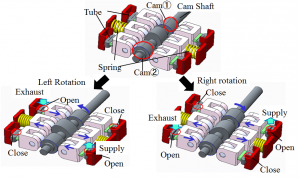
空気圧駆動のロボットシステムにおいて,空気圧サーボバルブはアクチュエータの性能に直結する重要な要素です.現在,大流量かつ高精度を実現するサーボバルブとして,スプールの位置をボイスコイルによって制御し流量を制御するスプール型サーボバルブが広く使われています.しかしスプール型バルブは摺動部をもつため,そこから空気の漏れが発生し,それに伴い空気の消費量が増加することで大きなエネルギーロスが生じるという問題を抱えています.
そこで本研究室では,弾性チューブをサーボモータに取り付けたカムでつぶすことで流量を制御する,空気の漏れが起こらないサーボバルブを開発しました.実際にロボットシステムに実装し,既存のスプールバルブと比較した結果,漏れ流量を最大95%減少させることに成功しました.