形成外科用微細手術支援ロボットシステム
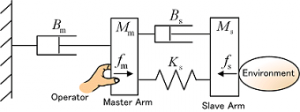
形成外科におけるマイクロサージャリーを対象としたマスタ・スレーブ型の手術支援ロボットシステムの研究を行っています。機構や制御方法に工夫を凝らすことで、コンパクトで操作性の良いシステムを実現し、実用化を目指して開発を進めています。
![]()
形成外科におけるマイクロサージャリーを対象としたマスタ・スレーブ型の手術支援ロボットシステムの研究を行っています。機構や制御方法に工夫を凝らすことで、コンパクトで操作性の良いシステムを実現し、実用化を目指して開発を進めています。