腹腔鏡手術用ハンド型空気圧駆動マニピュレータ
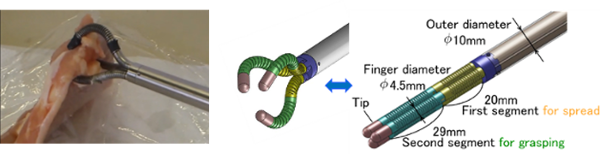
腹腔鏡手術においてマスタ・スレーブ方式により操作可能なハンド型マニピュレータの開発を行っています. 本マニピュレータは,柔軟構造による指関節を有しており,一直線状の形態で腹腔内に進入し,内部でハンド状に展開可能となっています. また,空気圧駆動を採用することで把持力等を計測制御できることを特徴としています.
![]()
腹腔鏡手術においてマスタ・スレーブ方式により操作可能なハンド型マニピュレータの開発を行っています. 本マニピュレータは,柔軟構造による指関節を有しており,一直線状の形態で腹腔内に進入し,内部でハンド状に展開可能となっています. また,空気圧駆動を採用することで把持力等を計測制御できることを特徴としています.