手術ロボットシステム用ハプティックインターフェースの開発
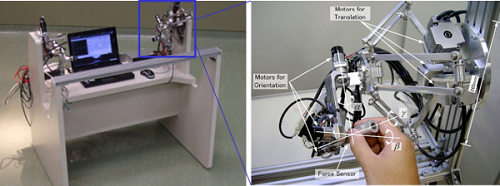
手術支援ロボットシステムの操作のためのハプティックインターフェースの開発を行っています. 安定な操作と高感度の反力フィードバックの実現を目指して,機構や制御方法の検討を重ねています. また,指先に刺激を与えることで力覚感度を向上させる研究も行っています.
![]()
手術支援ロボットシステムの操作のためのハプティックインターフェースの開発を行っています. 安定な操作と高感度の反力フィードバックの実現を目指して,機構や制御方法の検討を重ねています. また,指先に刺激を与えることで力覚感度を向上させる研究も行っています.