空気圧サーボシステムに関する研究
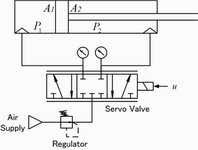
一般に,空気圧アクチュエータは空気の圧縮性などによる非線形特性を有していますが, サーボバルブを用いて圧力センサから得られる駆動力の制御ループを構成することで, 空気圧駆動特有の非線形性を補償することが可能となり,駆動力を高速,高精度に発生することができます. 空気圧アクチュエータを用いた駆動システムのさらなる性能向上を目指して、バルブや空気圧回路、制御方法に関する研究を行っています。
![]()
一般に,空気圧アクチュエータは空気の圧縮性などによる非線形特性を有していますが, サーボバルブを用いて圧力センサから得られる駆動力の制御ループを構成することで, 空気圧駆動特有の非線形性を補償することが可能となり,駆動力を高速,高精度に発生することができます. 空気圧アクチュエータを用いた駆動システムのさらなる性能向上を目指して、バルブや空気圧回路、制御方法に関する研究を行っています。