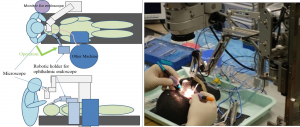
2020.03.23 / 最終更新日 : 2020.03.31 只野耕太郎 眼内内視鏡保持ロボットシステム 網膜硝子体手術において、術者の第3の手として,眼内内視鏡を安全かつ精密に保持,操作するロボットシステムの研究開発を行っています。安全性の高い機構や眼球の回転に対する視野の補正機能などの研究を行っています。

 網膜硝子体手術において、術者の第3の手として,眼内内視鏡を安全かつ精密に保持,操作するロボットシステムの研究開発を行っています。安全性の高い機構や眼球の回転に対する視野の補正機能などの研究を行っています。網膜硝子体手術において、術者の第3の手として,眼内内視鏡を安全かつ精密に保持,操作するロボットシステムの研究開発を行っています。安全性の高い機構や眼球の回転に対する視野の補正機能などの研究を行っています。
網膜硝子体手術において、術者の第3の手として,眼内内視鏡を安全かつ精密に保持,操作するロボットシステムの研究開発を行っています。安全性の高い機構や眼球の回転に対する視野の補正機能などの研究を行っています。網膜硝子体手術において、術者の第3の手として,眼内内視鏡を安全かつ精密に保持,操作するロボットシステムの研究開発を行っています。安全性の高い機構や眼球の回転に対する視野の補正機能などの研究を行っています。