空気圧駆動ロボットアームを用いた腹腔鏡操作システム
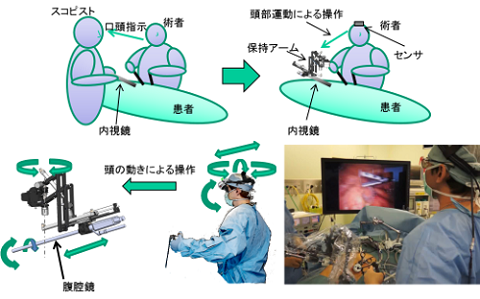
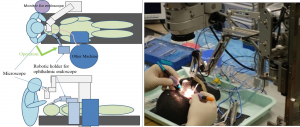
本研究では、腹腔鏡手術において術者自身が助手の手を借りることなく内視鏡視野を操作できるシステムの開発を行っています。 内視鏡を把持した空気圧駆動ロボットアームを術者の頭部運動に連動させることで直感的な操作性を実現しています。 頭部運動による動作指令に対して、保持アームが十分な追従性を有することを実験的に確認するとともに、 in-vivo実験からも開発したシステムの有効性を実証しています
![]()
本研究では、腹腔鏡手術において術者自身が助手の手を借りることなく内視鏡視野を操作できるシステムの開発を行っています。 内視鏡を把持した空気圧駆動ロボットアームを術者の頭部運動に連動させることで直感的な操作性を実現しています。 頭部運動による動作指令に対して、保持アームが十分な追従性を有することを実験的に確認するとともに、 in-vivo実験からも開発したシステムの有効性を実証しています