力覚提示機能を有する腹腔鏡手術用ロボットシステム
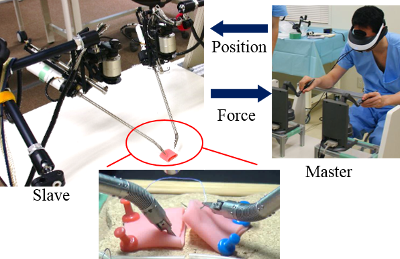
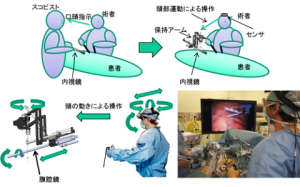
腹腔鏡手術用のマスタ・スレーブ型ロボットシステムの研究開発を行っています. 本システムは,患者側で処置を行うスレーブアームと,医師が操作するマスタアームから構成されます. スレーブアームに空気圧駆動を採用することで,人体と接触しても柔らかく力を吸収できるだけでなく, 空気の圧力情報から反力を推定して,操作者の手に力覚提示できることを特徴としています.
![]()
腹腔鏡手術用のマスタ・スレーブ型ロボットシステムの研究開発を行っています. 本システムは,患者側で処置を行うスレーブアームと,医師が操作するマスタアームから構成されます. スレーブアームに空気圧駆動を採用することで,人体と接触しても柔らかく力を吸収できるだけでなく, 空気の圧力情報から反力を推定して,操作者の手に力覚提示できることを特徴としています.