弾性チューブを用いた空気圧サーボバルブの開発
空気圧駆動のロボットシステムにおいて,空気圧サーボバルブはアクチュエータの性能に直結する重要な要素です.現在,大流量かつ高精度を実現するサーボバルブとして,スプールの位置をボイスコイルによって制御し流量を制御するスプール型サーボバルブが広く使われています.しかしスプール型バルブは摺動部をもつため,そこから空気の漏れが発生し,それに伴い空気の消費量が増加することで大きなエネルギーロスが生じるという問題を抱えています.
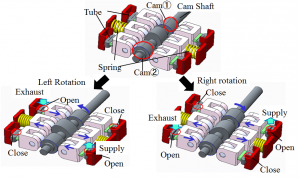
そこで本研究室では,弾性チューブをサーボモータに取り付けたカムでつぶすことで流量を制御する,空気の漏れが起こらないサーボバルブを開発しました.実際にロボットシステムに実装し,既存のスプールバルブと比較した結果,漏れ流量を最大95%減少させることに成功しました.